
表1 主流高精度諧波減速機性能比較
注:上表比較數據來自相近型號:
HD :CSF-17-100
中技克美:XB1-40-100
傳動效率測試工況:輸入轉速1000r/min,溫度40°
扭轉剛度測試條件:20%額定扭矩內
國內外工業機器人主流高精度擺線針輪減速機性能比較如下表所示。
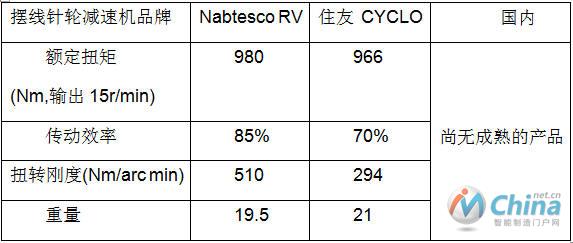
表2 主流高精度RV擺線針輪減速機性能比較
注:上表比較數據來自相近型號:
RV:100C
CYCLO:F2CF-C35
傳動效率測試工況:輸出轉速15r/min,額定扭矩
2)伺服電機
在伺服電機和驅動方面,目前歐系機器人的驅動部分主要由倫茨,Lust,博世力士樂等公司提供,這些歐系電機及驅動部件過載能力,動態響應好,驅動器開放性強,且具有總線接口,但是價格昂貴。而日系品牌工業機器人關鍵部件主要由安川,松下,三菱等公司提供,其價格相對降低,但是動態響應能力較差,開放性較差,且大部分只具備模擬量和脈沖控制方式。國內近年來也開展了大功率交流永磁同步電機及驅動部分基礎研究和產業化,如哈爾濱工業大學,北京和利時,廣州數控等單位,并且具備了一點的生產能力,但是其動態性能,開放性和可靠性還需要更多的實際機器人項目應用進行驗證。

伺服電機
3)控制器
在機器人控制器方面,目前國外主流機器人廠商的控制器均為在通用的多軸運動控制器平臺基礎上進行自主研發。目前通用的多軸控制器平臺主要分為以嵌入式處理器(DSP,POWER PC)為核心的運動控制卡和以工控機加實時系統為核心的PLC系統,其代表分別是Delta Tau的PMAC卡和Beckhoff的TwinCAT系統。國內的在運動控制卡方面,固高公司已經開發出相應成熟產品,但是在機器人上的應用還相對較少。
5.機器人操作系統
通用的機器人操作系統(robot operating system,ROS)是為機器人而設計的標準化的構造平臺,它使得每一位機器人設計師都可以使用同樣的操作系統來進行機器人軟件開發。ROS將推進機器人行業向硬件、軟件獨立的方向發展。硬件、軟件獨立的開發模式,曾極大促進了PC、筆記本電腦和智能手機技術的發展和快速進步。
ROS的開發難度比計算機操作系統更大,計算機只需要處理一些定義非常明確的數學運算任務,而機器人需要面對更為復雜的實際運動操作。
ROS提供標準操作系統服務,包括硬件抽象、底層設備控制、常用功能實現、進程間消息以及數據包管理。
ROS分成兩層,低層是操作系統層,高層則是用戶群貢獻的機器人實現不同功能的各種軟件包。
現有的機器人操作系統架構主要有基于linux的Ubuntu開源操作系統。另外,斯坦福大學、麻省理工學院、德國慕尼黑大學等機構已經開發出了各類ROS系統。微軟機器人開發團隊2007年也曾推出過一款“Windows機器人版”。
6.機器人的運動規劃
為了提高工作效率,且使機器人能用盡可能短的時間完成特定的任務,必須有合理的運動規劃。離線運動規劃分為路徑規劃和軌跡規劃。
路徑規劃的目標是使路徑與障礙物的距離盡量遠同時路徑的長度盡量短;軌跡規劃的目的主要是機器人關節空間移動中使得機器人的運行時間盡可能短,或者能量盡可能小。軌跡規劃在路徑規劃的基礎上加入時間序列信息,對機器人執行任務時的速度與加速度進行規劃,以滿足光滑性和速度可控性等要求。
示教再現是實現路徑規劃的方法之一,通過操作空間進行示教并記錄示教結果,在工作過程中加以復現,現場示教直接與機器人需要完成的動作對應,路徑直觀且明確。缺點是需要經驗豐富的操作工人,并消耗大量的時間,路徑不一定最優化。為解決上述問題,可以建立機器人虛擬模型,通過虛擬的可視化操作完成對作業任務的路徑規劃。
路徑規劃可在關節空間中進行。Gasparetto以五次B樣條為關節軌跡的插值函數,并將加加速度的平方相對于運動時間的積分作為目標函數進行優化,以確保各個關節運動足夠光滑。劉松國通過采用五次B樣條對機器人的關節軌跡進行插補計算,機器人各個關節的速度、加速度端點值,可根據平滑性要求進行任意配置。另外,在關節空間的軌跡規劃可避免操作空間的奇異性問題。Huo等人設計了一種關節空間中避免奇異性的關節軌跡優化算法,利用6自由度弧焊機器人在任務過程中某個關節功能上的冗余,將機器人奇異性和關節限制作為約束條件,采用TWA方法進行優化計算。
關節空間路徑規劃與操作空間路徑規劃對比,具有以下優點:
①避免了機器人在操作空間中的奇異性問題;
②由于機器人的運動是通過控制關節電機的運動,因此在關節空間中,避免了大量的正運動學和逆運動學計算;
③關節空間中各個關節軌跡便于控制的優化。
五、工業機器人分類
工業機器人按不同的方法可分下述類型:
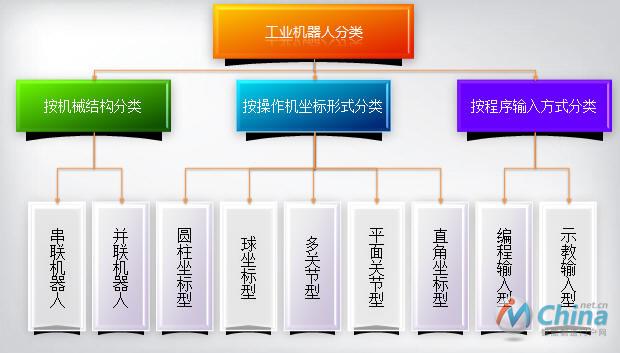
工業機器人分類
1.從機械結構來看,分為串聯機器人和并聯機器人。
1)串聯機器人的特點是一個軸的運動會改變另一個軸的坐標原點,在位置求解上,串聯機器人的正解容易,但反解十分困難;
2)并聯機器人采用并聯機構,其一個軸的運動則不會改變另一個軸的坐標原點。并聯機器人具有剛度大、結構穩定、承載能力大、微動精度高、運動負荷小的優點。其正解困難反解卻非常容易。串聯機器人和并聯機器人如圖所示。

串聯機器人 并聯機器人
2.工業機器人按操作機坐標形式分以下幾類:(坐標形式是指操作機的手臂在運動時所取的參考坐標系的形式。)
1)直角坐標型工業機器人
其運動部分由三個相互垂直的直線移動(即PPP)組成,其工作空間圖形為長方形。它在各個軸向的移動距離,可在各個坐標軸上直接讀出,直觀性強,易于位置和姿態的編程計算,定位精度高,控制無耦合,結構簡單,但機體所占空間體積大,動作范圍小,靈活性差,難與其他工業機器人協調工作。
2)圓柱坐標型工業機器人
其運動形式是通過一個轉動和兩個移動組成的運動系統來實現的,其工作空間圖形為圓柱,與直角坐標型工業機器人相比,在相同的工作空間條件下,機體所占體積小,而運動范圍大,其位置精度僅次于直角坐標型機器人,難與其他工業機器人協調工作。
3)球坐標型工業機器人
球坐標型工業機器人又稱極坐標型工業機器人,其手臂的運動由兩個轉動和一個直線移動(即RRP,一個回轉,一個俯仰和一個伸縮運動)所組成,其工作空間為一球體,它可以作上下俯仰動作并能抓取地面上或教低位置的協調工件,其位置精度高,位置誤差與臂長成正比。
4)多關節型工業機器人
又稱回轉坐標型工業機器人,這種工業機器人的手臂與人一體上肢類似,其前三個關節是回轉副(即RRR),該工業機器人一般由立柱和大小臂組成,立柱與大臂見形成肩關節,大臂和小臂間形成肘關節,可使大臂做回轉運動和俯仰擺動,小臂做仰俯擺動。其結構最緊湊,靈活性大,占地面積最小,能與其他工業機器人協調工作,但位置精度教低,有平衡問題,控制耦合,這種工業機器人應用越來越廣泛。
5)平面關節型工業機器人
它采用一個移動關節和兩個回轉關節(即PRR),移動關節實現上下運動,而兩個回轉關節則控制前后、左右運動。這種形式的工業機器人又稱(SCARA(Seletive Compliance Assembly Robot Arm)裝配機器人。在水平方向則具有柔順性,而在垂直方向則有教大的剛性。它結構簡單,動作靈活,多用于裝配作業中,特別適合小規格零件的插接裝配,如在電子工業的插接、裝配中應用廣泛。
2024-08-30 02:45
2024-04-15 09:16
2024-04-09 08:56
2024-04-07 08:07
2024-03-11 11:00
2023-08-17 09:41
2023-08-14 09:40
2021-12-22 11:57
2021-07-30 08:50
2021-07-27 08:53























 粵公網安備 44010602004352號
粵公網安備 44010602004352號